UPDATE 4
ADDED ADJUSTABILITY TO MOUNTS
FEB 4, 2022
Summary
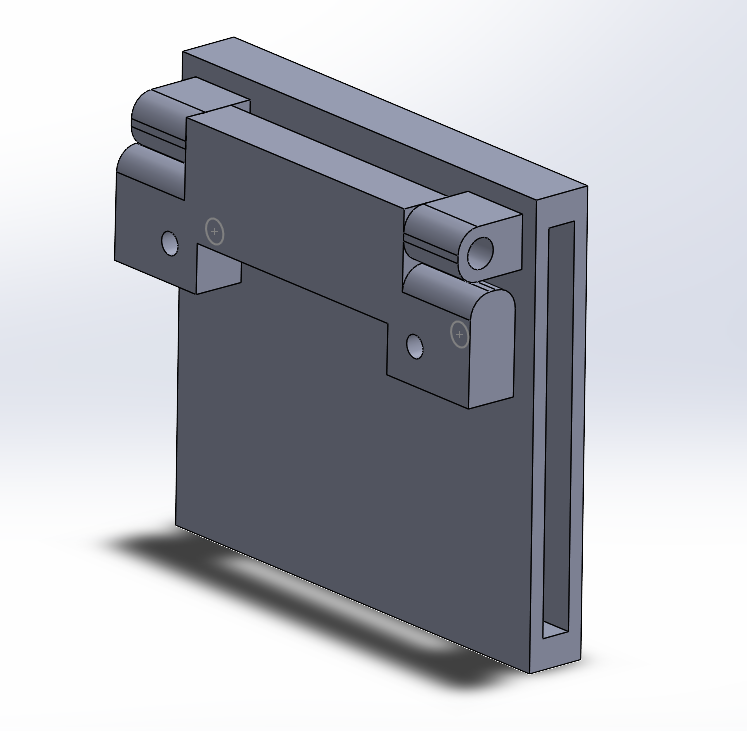
To support calibration, the mounts have been broken down into the camera
mount and the robotic arm mounts. This allows for a more general-use design
to be developed for more models of robots. They can be adjusted with one
axis of rotation, and fixed in the adjusted angle using a bolt and screw.
A future iteration will have better rotational options.

UPDATE 3
ADDED NEW PACKAGES
JAN 27, 2022
Summary
This week we added the appropriate packages to the Fanuc robot controller
(thanks Fanuc!) For TCP/IP connection. This allowed us to connect the robot
to RViz for live monitoring and control. The video below shows an example of
the simulated robot in RViz moving alongside the physical robot in the lab.
UPDATE 2
DESIGNED PROTOTYPE CAD MODELS FOR CAMERA MOUNT
JAN 16, 2022
Summary
This week models were designed for camera mounts to the robotic arm.
Two general-use models have been developed for use with a strap to an
individual link of the robotic arm or to be attached to existing
fixtures on the sides of the robot.
UPDATE 1
CONTROLLED ROBOT IN SIMULATION USING ROS
JAN 7, 2022
Summary
This week we were able to control the Fanuc robot in simulation with
the same packages that we used for controlling the actual robot. This
provides us the flexibility to develop appropriate collision algorithms
in rviz (using C++/Python in Linux), and observe its effect on the
robot in simulation (using roboguide) running on a windows PC, without
the need to have access to the real robot. The video below exhibits
this scenario, with the left screen showing rviz running on a linux
PC, and Fanuc's Roboguide running on the right screen on a windows
PC.